









在現代科技的推動下,"巡檢無人機"已經成為工業監測、農業管理、基礎設施巡檢等領域的重要工具。這些自動巡航無人機以其高效、精準的巡檢能力,為各行各業帶來了革命性的改變。本文將深入探討"自動巡航無人機"的工作原理,解析它們如何實現自主巡檢。

飛行控制系統:巡檢無人機的大腦
巡檢無人機的飛行控制系統是其核心,負責整合傳感器數據、GPS信號和操作指令,確保無人機穩定飛行。這一系統能夠實時調整飛行姿態,保持航線的精確性。
GPS與傳感器融合:精確定位與導航
通過集成GPS和多種傳感器,如氣壓計、陀螺儀和加速度計,"自動巡航無人機"能夠實現精確的空中定位和導航。這些傳感器的數據融合為無人機提供了穩定的飛行環境感知能力。
航線規劃與自動執行:智能巡檢的基礎
"巡檢無人機"可以根據預設的航線自動執行飛行任務。操作員可以在地面站軟件中規劃航線,無人機將按照既定路徑進行巡檢,無需人工干預。

自主避障技術:安全飛行的保障
在飛行過程中,"自動巡航無人機"利用雷達、激光雷達(LiDAR)或視覺傳感器檢測障礙物。結合先進的算法,無人機能夠實時識別并規避障礙,保障飛行安全。
數據采集與實時處理:智能分析的關鍵
"巡檢無人機"搭載的攝像頭和傳感器不僅用于導航,還能收集圖像和環境數據。通過機載計算模塊或將數據傳輸至地面站,進行實時分析,以識別潛在問題和異常。
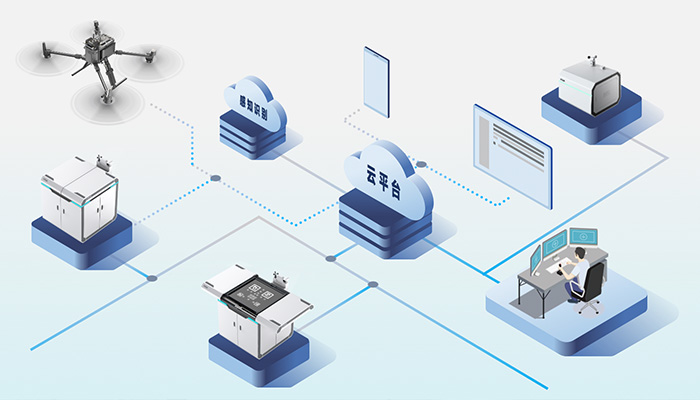
無線通信與遠程控制:操作的靈活性
"自動巡航無人機"通過無線通信技術與操作員保持聯系,傳輸飛行數據和接收控制指令。在必要時,操作員可以手動接管無人機,進行精確控制。
"巡檢無人機"以其先進的飛行控制系統、精確的導航技術、智能的航線規劃、自主避障能力、高效的數據采集與處理能力,以及穩定的無線通信與遠程控制功能,正在成為智能巡檢的得力助手。隨著技術的不斷進步,它們將在更多領域展現其強大的應用潛力,為社會帶來更多便利和安全保障。